



丁文伯團隊在透明物體抓取領(lǐng)域取得新進展
透明物體由于其美觀、簡約等特點而在生活中廣泛應(yīng)用,廚房、商店、工廠都能見到他們的身影。透明物體雖然很常見,但對于機器人而言,復(fù)雜環(huán)境下的透明物體的感知和抓取卻是一個非常困難的問題,這與其自身的屬性有直接給關(guān)系。首先透明物體存在較少的紋理信息,所產(chǎn)生的紋理大都是由于光線折射、反射造成的,這就給透明物體的檢測帶來了很大的困難。其次透明物體表面光滑,即使抓取位置存在較小偏差,也可能導(dǎo)致抓取任務(wù)的失敗。因此,如何解決復(fù)雜場景下的透明物體抓取問題已經(jīng)成為了機器人領(lǐng)域公認的非常重要且具有挑戰(zhàn)的課題。
近日,我院丁文伯副教授的智能感知與機器人(Smart Sensing and Robotics, SSR)課題組與合作者提出了一個基于視觸融合的透明物體抓取框架,該框架模仿了人在低可見度情況下抓取物體的動作,并利用視觸融合來實現(xiàn)透明物體的檢測和抓取。該方法不僅具有極高的抓取成功率,還可以實現(xiàn)玻璃碎片、堆積、重疊、起伏、沙子和水下場景下的物體抓取。
該成果以“利用視觸融合解決復(fù)雜背景下的透明物體抓取問題”(Visual-Tactile Fusion for Transparent Object Grasping in Complex Backgrounds)為題,在《IEEE機器人匯刊》(IEEE Transactions on Robotics,TRO)上發(fā)表。
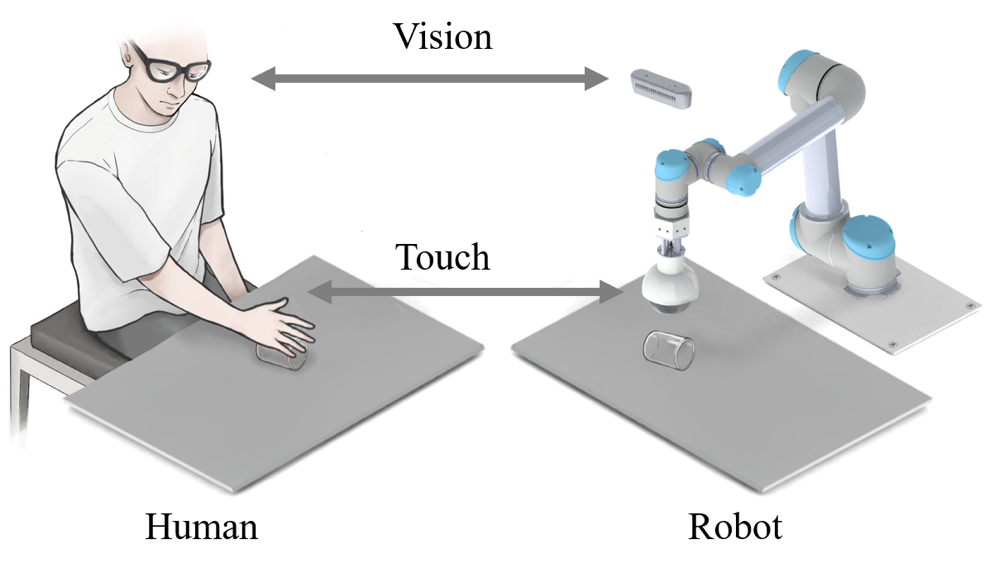
圖1 視觸融合抓取示意圖
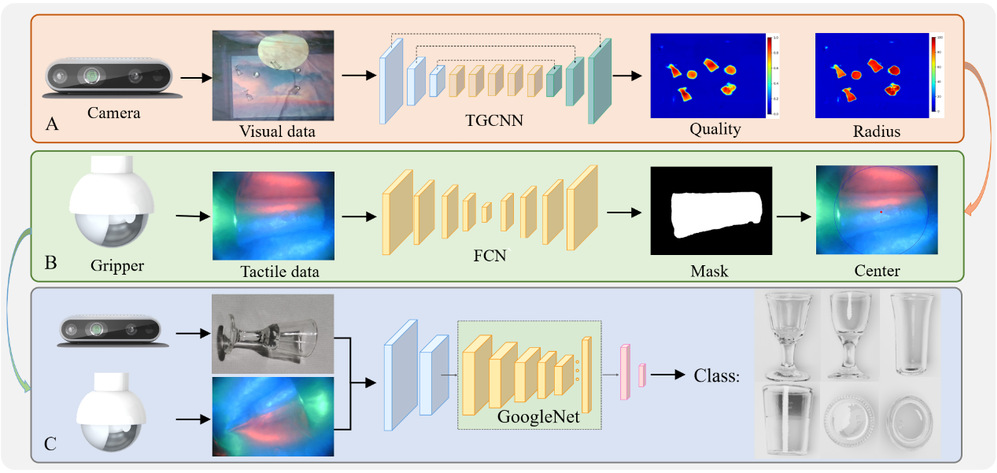
圖2 視觸融合抓取算法示意圖
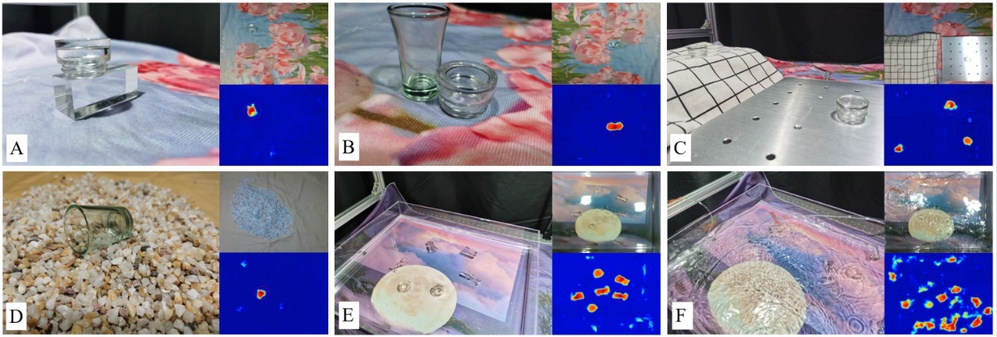
圖3 視觸融合抓取算法應(yīng)用場景
清華大學(xué)深圳國際研究生院數(shù)據(jù)與信息研究院丁文伯副教授為論文的通訊作者,劉厚德研究員為共同通訊作者,清華大學(xué)深圳國際研究生院2023級博士研究生李壽杰、2021級碩士研究生于海鑫為論文的共同第一作者。論文作者還包括上海大學(xué)人工智能研究院副研究員葉林奇,清華大學(xué)博士后夏崇坤,清華大學(xué)深圳國際研究生院王學(xué)謙教授、張曉平教授。該項目得到了國家自然科學(xué)基金、清華大學(xué)深圳國際研究生院鵬瑞青年教師啟航計劃、清華大學(xué)深圳國際研究生院交叉科研創(chuàng)新基金、廣東省基礎(chǔ)與應(yīng)用基礎(chǔ)研究基金、清華大學(xué)國強研究院等項目的資助。
原文鏈接:
https://ieeexplore.ieee.org/document/10175024
文/圖: 李壽杰
編輯:戴雨靜
審核:陳超群

電話:0755-28228190
傳真:0755-28938350
地址:深圳市光明東周社區(qū)興新路288號康佳光明科技中心A9粵ICP備10224802號
技術(shù)支持:友匯網(wǎng)